
 产品:40
产品:40
 联系我们
联系我们



下面开始介绍如何创建喷涂工作站:
1、打开RobotStudio软件。
2、点击新建“空工作站”。
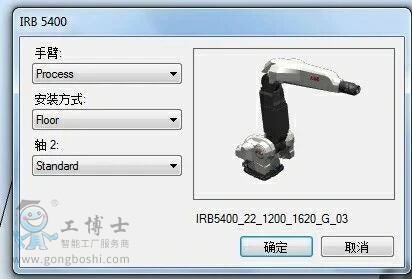
3、从“机器人模型库”导入机器人,从“导入模型库”导入雾化器。

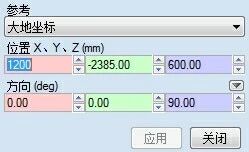
4、在“布局”中右键点击机器人,选择“设定位置”。输入现场机器人位置数据。
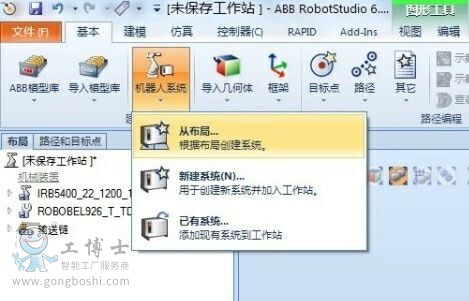
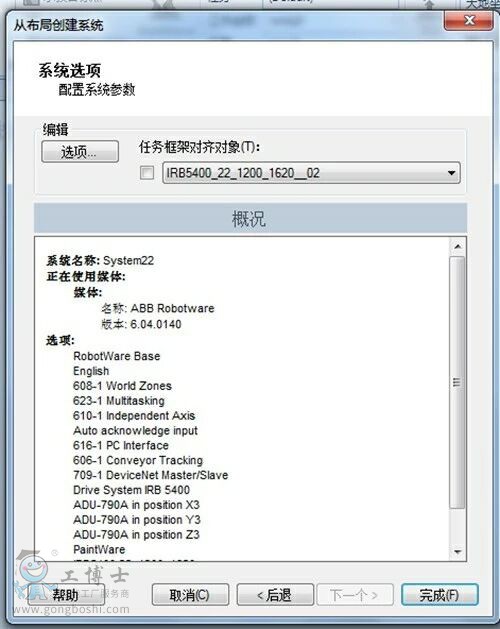
5、在“机器人系统”中选择“从布局”创建系统。选择Robotware版本。点击两个“下一个”到达下图位置。
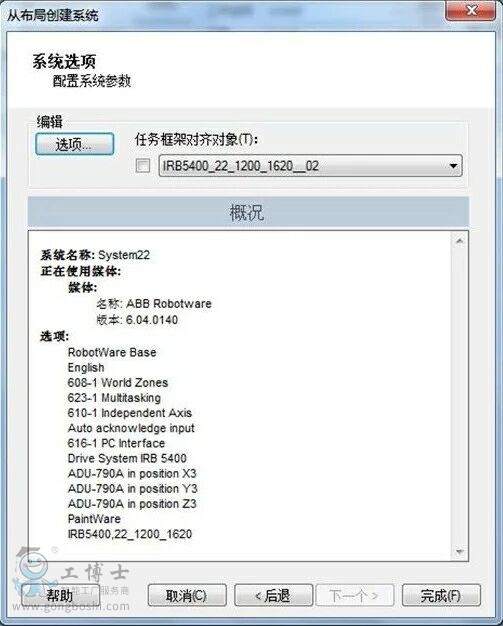
点击“选项”。
点击“MotionCoordination”
勾选“606-1conveyor Tracking”
选择“ConveyorTracking on PIB”
点击“确定”

点击“完成”。
注:本文章文字、图片部分来自网络
版权归原作者,侵删。

工博士可以提供了ABB,库卡,安川,发那科和欧地希等各种常用机器人型号,并且包括机器人的配件,保养,维修,培训等等服务我们都可以进行服务,真正做到了为客户进行一站式的服务保障,并且工博士现已经是集九大机器人代理于一体的智能工厂一站式服务商,我们相信,我们真正地在协助第四次工业革命的进步,并为所有涉及机器人技术的人们增加优势和收益!如果您想获得更多信息,请在线留言或致电与我们联系 。